


2017年3月,FIRST机器人挑战赛(FRC)深圳区域赛,6304团队荣获新队伍最高荣誉奖“新秀全明星奖 ”,并与南京5839团队、深圳5516团队共同获得亚军联盟。
TEAM 6304 机器人技术简介
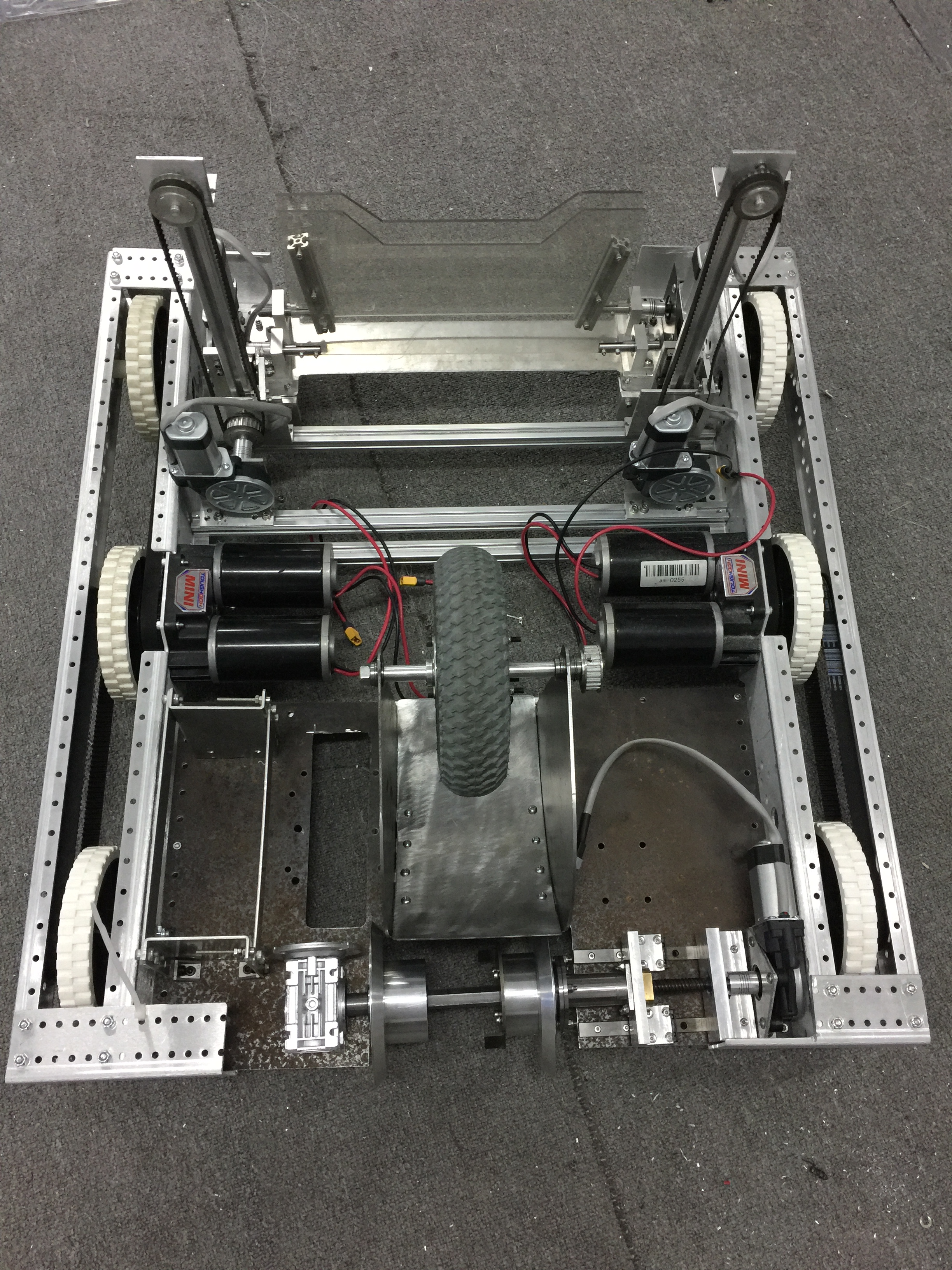
一、机械机构
本次竞赛要完成三大任务,分别是:装载燃料球并送到锅炉中,装载齿轮并送到飞艇上,及起飞前的准备。本团队在工程组成员多次开会讨论下确定了我们机器人的设计方案,对相应的任务设计相应的机构。
1. 装载燃料球并送到锅炉
获取燃料球的方法有两种:一种是通过机器人撞hopper获得,该方法获取球的数量较多;另一种方法是机器人拾取场地上的球,这种方法获取燃料球的效率较低,但是考虑的比赛现场可能出现满场地的燃料球,若不拾取地上的燃料球,有可能会挡着机器人行走的路线,因此采用电机驱动滚轮,可以将地上的球拾取到储球区,也可以将挡着机器人前方的球拨出去。由于燃料球可以从低处投入到锅炉中,也可以从高处投入,但是分值不一样,高处投入燃料球分值较高,因此我们只考虑向高处发射燃料球。
发射燃料球采用了飞轮机构,用一个高转速的电机驱动气轮,将燃料球弹飞出去,为了控制燃料球能以一定的弧度抛射到锅炉中,我们对球抛出前的轨迹进行了规划,即设计了发球的轨道。该轨道由两部分组成:与气轮同轴的一段弧面和一段切平面。通过仿真软件对球的轨迹进行运动分析得出,弧面不宜超过45度,切平面不宜超过100mm,且该弧面到气轮面的距离为要小于燃料球的直径,我们的设计是124mm,这样保证燃料球受到一定的压力;使燃料球能按照既定的轨迹发射的锅炉中。
发球装置由两个电机配合实现燃料球的连续有序的发射。在飞轮高速运转后,进球口的电机才起动把燃料油有序的送到飞轮处,确保了每个球在飞轮最佳转速下被发射出去,也确保发射的燃料球之间还有一定的时间间隔,避免了燃料球的相互干扰。
亮点:弧形面和切平面的设计,两电机协同工作,确保发球有序。
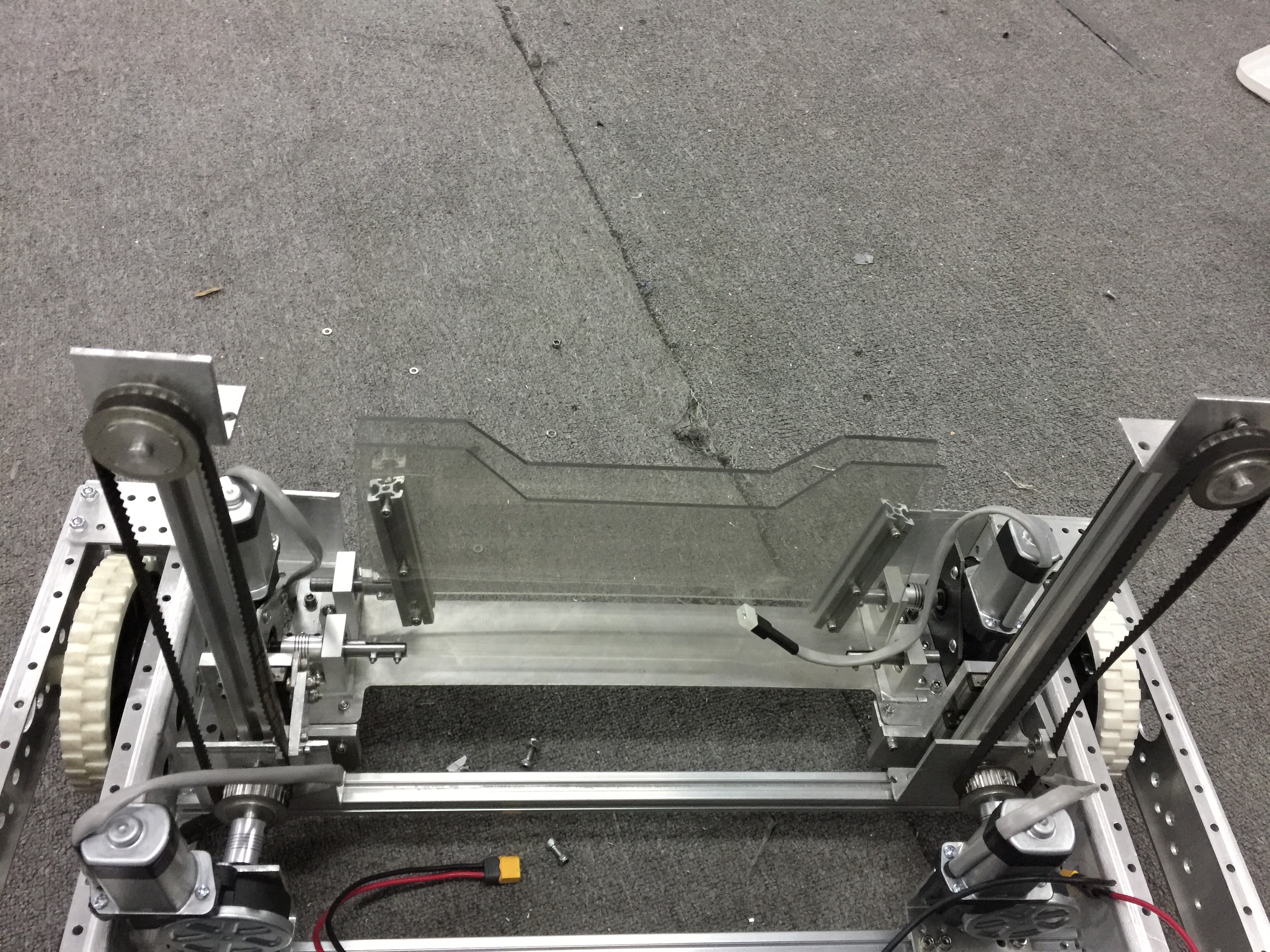
2.装载齿轮并送到飞艇
机器人获取齿轮的方法也有两种,一种是拾取场地上的齿轮(可能是别的机器人掉下来的),另一种个是到装载车道(loading lane)上获取,我们设计的齿轮装载运送机构适合到装载车道上获取。该机构由前挡板和后挡板以及下方的铝板构成装载齿轮的装料槽,为了保证准确可靠的接住齿轮,且能可靠的将齿轮摆放在软钩上,装载齿轮的装置设计成可以升降,前挡板和后挡板可以活动。
当机器人到loading lane区域接齿轮时,该装置上升到最高处,确保齿轮落到装料槽中的高度最低,不会对装料槽产生过大的冲击力,从而保护了装料槽。同时为了能让齿轮准确落到槽中,后挡板和前挡板分开成八字形,使得接齿轮的开口最大。当齿轮落入到装料槽中后,前后两个挡板分别合上夹紧齿轮以确保在运输过程中抛出。到达飞艇前,升降机构先下降到适当位置后,将齿轮悬挂在弹簧钩上后,前后挡板再次分开,方便飞艇上的操作人员提取齿轮。
亮点:该装置用了4个电机实现动作,两个升降电机,前挡板和后挡板旋转电机。升降装置采用了导轨,两电机通过同步带传动驱动整个装料槽(包括驱动前后挡板的电机)上下移动,四个电机均带蜗杆涡轮减速器,起到自锁的作用,这样不管是升降还是前后挡板,都能保持在操作者想让其停放的位置上。
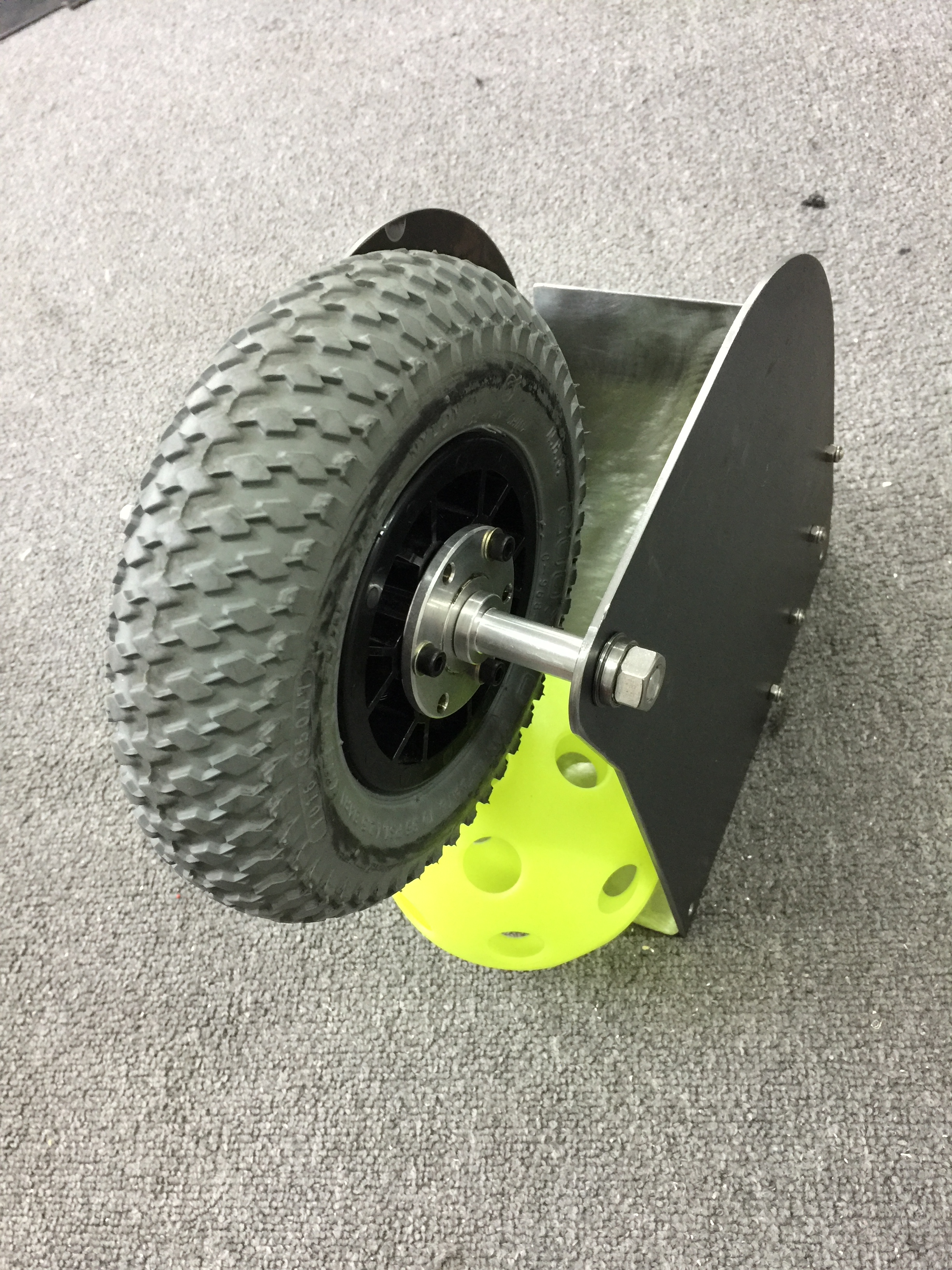
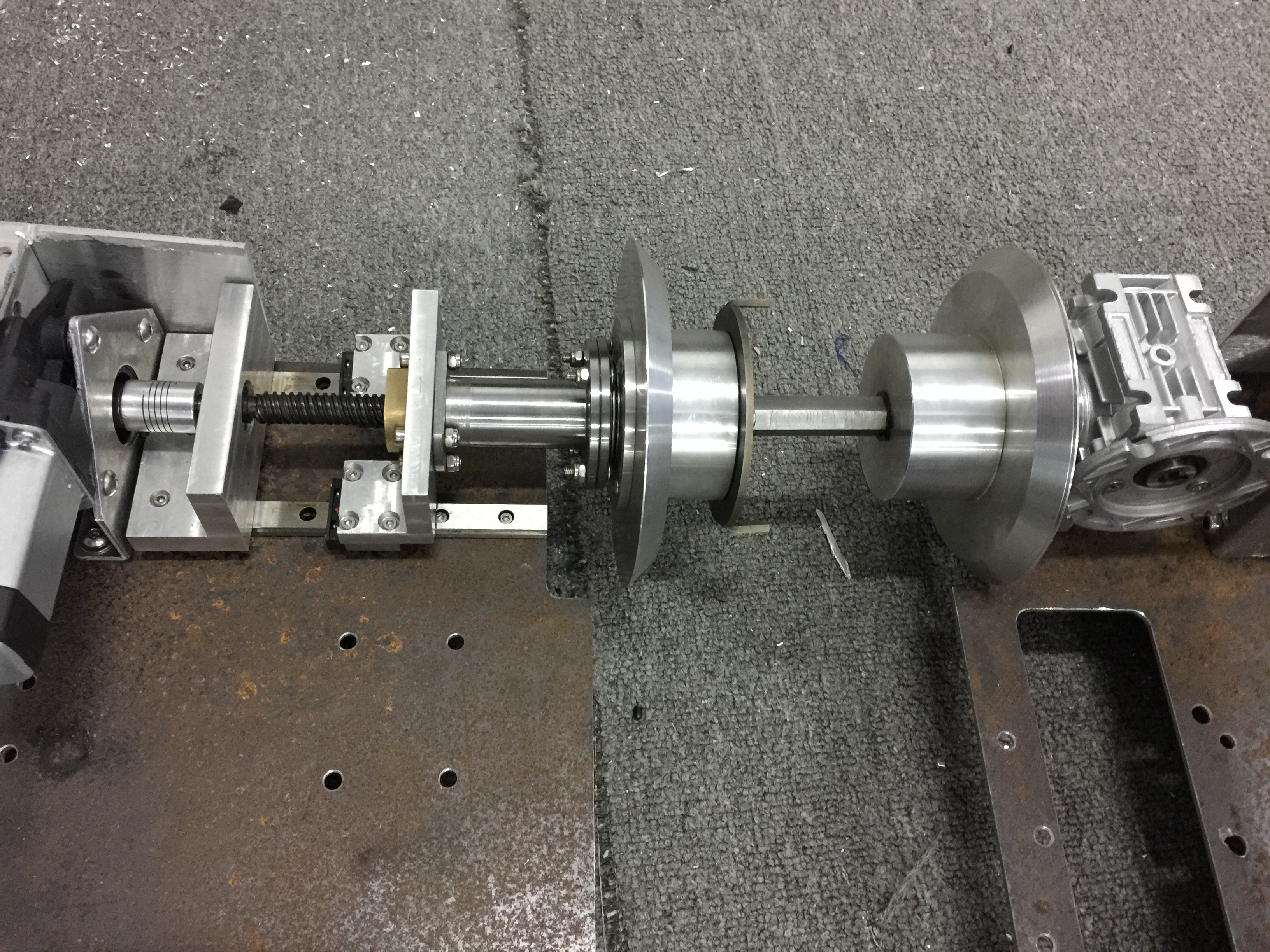
3.机器人起飞
最后30秒是机器人要起飞,即机器人要爬上2.54cm宽的绳子。我们采用的方案是:运用螺旋机构推动滚轮加紧绳子,运用双电机驱动滚轮旋转(保证足够的动力),使得绳子能沿着滚轮转动方向围绕,最终实现机器人爬到顶端推动触碰开关实现起飞的功能。
为了保证在爬绳子的过程中,绳子不滑落到滚轮外侧,在滚轮外侧装了挡板。
亮点:一般设计加紧绳子的方案用气动更简单方便,但是用气动会要用到气泵、气罐等其他辅助器件,大大占用空间,而用螺旋传动,只需要一个电机驱动螺旋机构即可,节省空间,控制方便。
二、控制部分
为了节省空间,没有采用气动控制,所有的机构的运动均采用电机驱动来实现。为了防止操作手在操作过程中出现操作失误,在三大机构中均采用限位开关对超程和误动作进行保护;为了能让机器人在自动阶段中沿着既定的路径行走,在特定的距离停下,运用陀螺仪实现特定方向的行走,运用超声波传感器控制机器人在特定距离处停下,以期望能实现自动阶段的运行。
