


底盘
机器人的总长度在经大家讨论后决定为长800mm,宽650mm,高650mm。因为考虑到要经过710mm高的战壕,所以机器高度必须定在700mm以下,我们经过估算机器定在650mm高度时(见图一),可以完全通过战壕并且不会受到阻拦。(因为从战壕区通过,不会受到对方的防守,从护盾发生器区行走时,可能会与对方机器发生强烈碰撞,浪费得分时间和机会。)
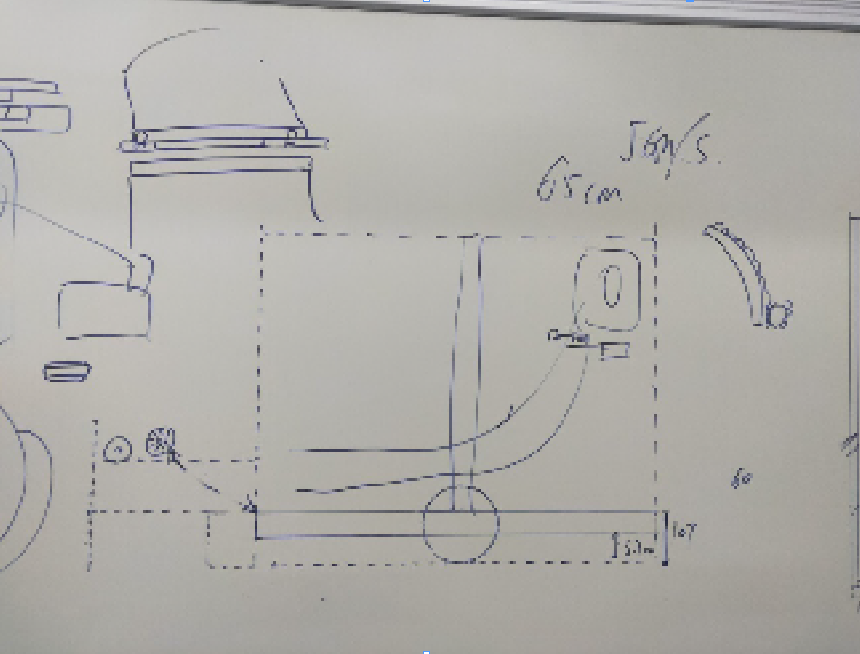
(图一)
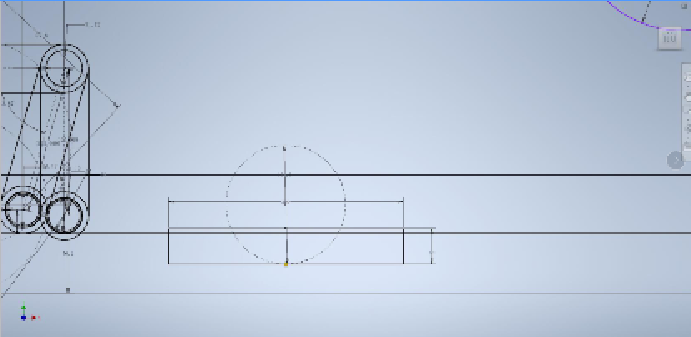
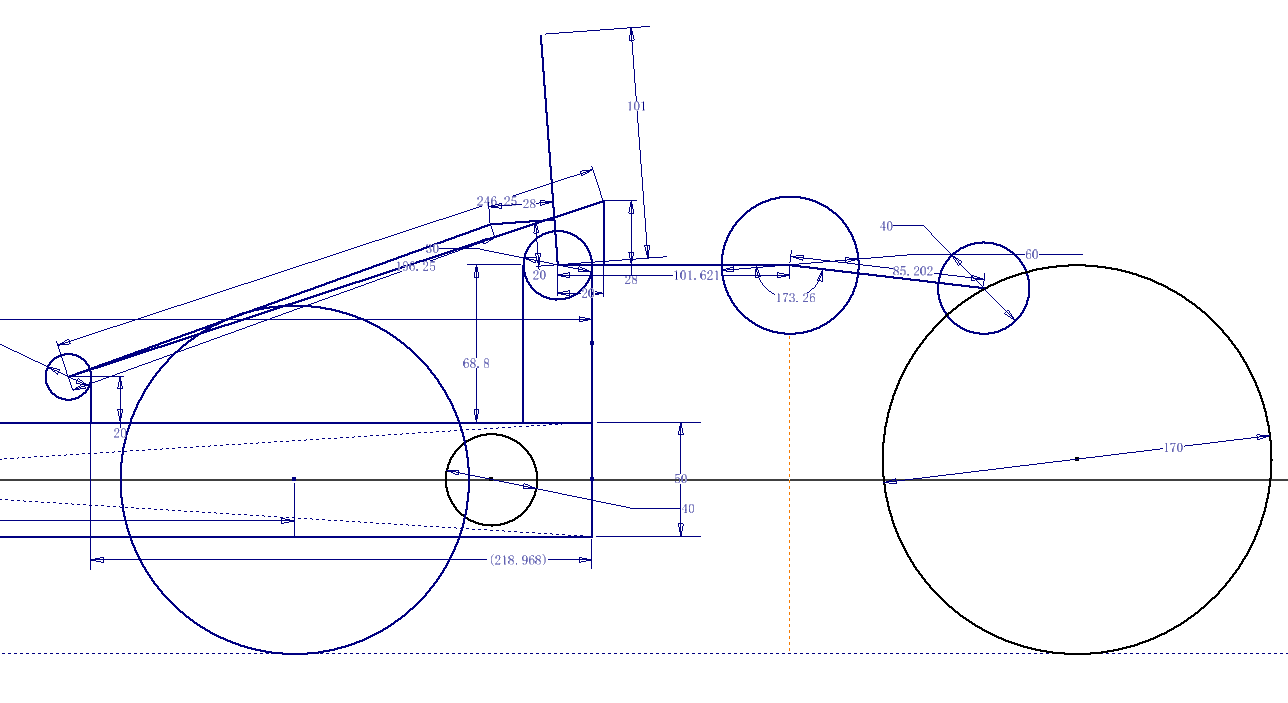
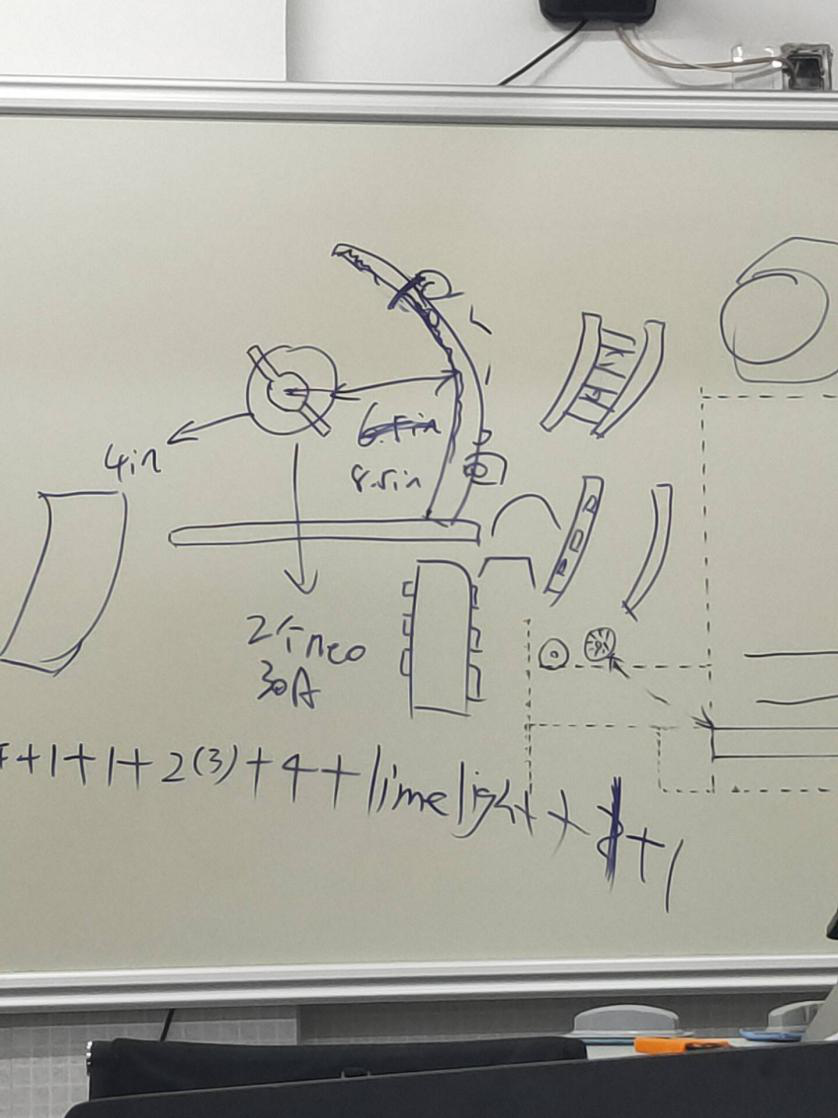
经过CAD绘制后底盘(见图二):总周长为2900mm,长800mm,宽650mm。设计组在软件中尝试使用4in摩擦轮,但是因为护盾发生器区地下的横杠高30mm,使用4in摩擦轮时,底盘离地仅为25.8mm(见图三)而选用6in轮子时,经过计算得出底盘底部离地51.2mm。所以最终决定使用6in摩擦轮。经过cad组制图,已初步完成底盘设计。

(图二)
(周三)
底盘减速器:
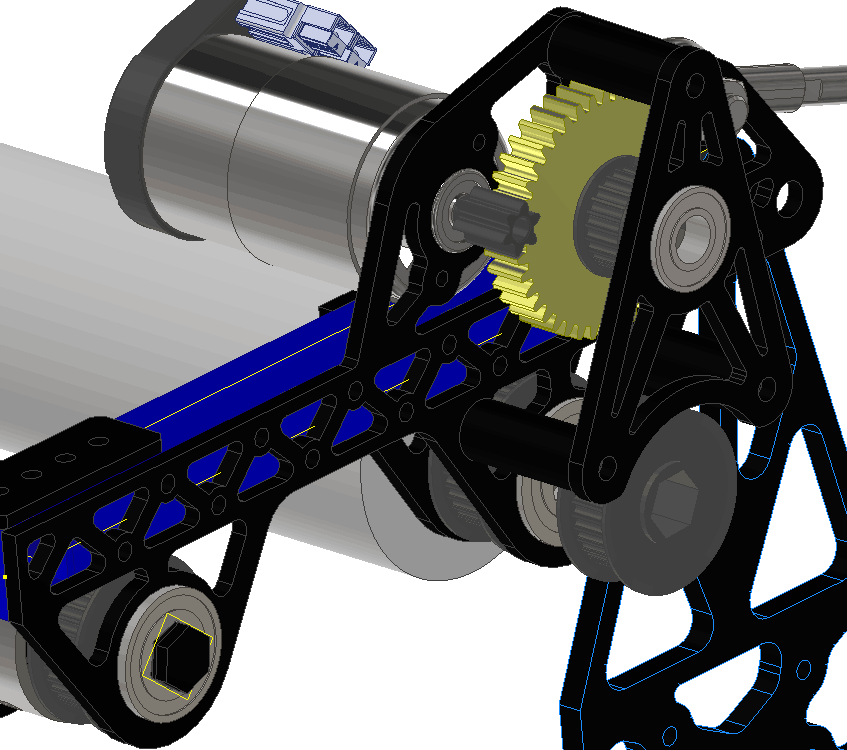
因为机械组考虑到接下来机器人整体布局会偏中,为了不影响机器的搭建,所以选择将后轮作为主动轮。减速器(见图四)由双NEO电机驱动,一开始电机输出齿轮是选用14t直齿轮,并搭配50t直齿轮作为第一级减速。第二级选用26t直齿轮搭配56t直齿轮,减速比为8.5:1,底盘速度为5.6m/s。但是因为临时发现基地缺少14t直齿轮,为了保证安装进度,我们不得不更改了原先的配置,电机输出齿轮改选用12t直齿轮,继续搭配50t直齿轮作为第一级减速。第二级减速不变。最终减速比改为8.9:1,经计算得出,速度变为5m/s。
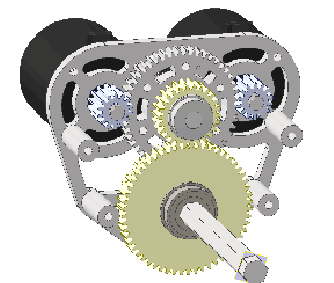
(图四)
Intake
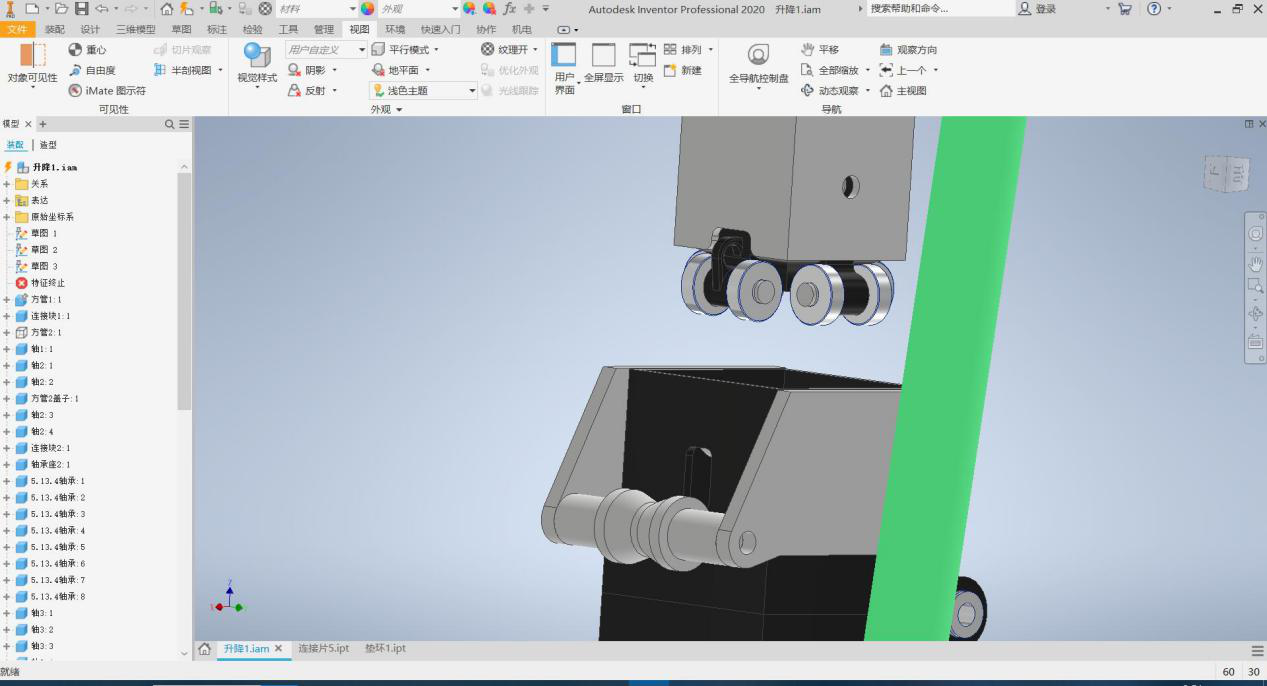
机械组经讨论设想使用气缸作为主动件,利用曲柄摇块结构将intake收回或者放下捡球。Intake前端使用60mm辊子(表面采用聚氨酯材料),紧接着使用直径为60mm的两组麦克纳姆轮去分拣能量电池。板材使用聚碳酸酯材料,保证intake在碰撞时不会弯折与断裂,并且在捡球时有一定的弹性形变,更易于球进入车厢内。并且使用一个775pro电机带动6cm直径的辊子吸入能量电池,再搭配6cm直径的麦克纳姆轮。辊子将电池吸至麦克纳姆轮处,再由麦克纳姆轮送至机器人中心。确定了整体思路后,机械组开始设计传动以及改变intake状态的方式。动力方面考虑到机器前进时的速度,辊子转速需要达到30r/s。我们采用的775pro电机经过约10:1的减速后,可以达到这个转速。Intake整体改变姿态的方式运用曲柄摇块机构,使其在不使用时能够收入至机器框架内(见图五)。
(图五)
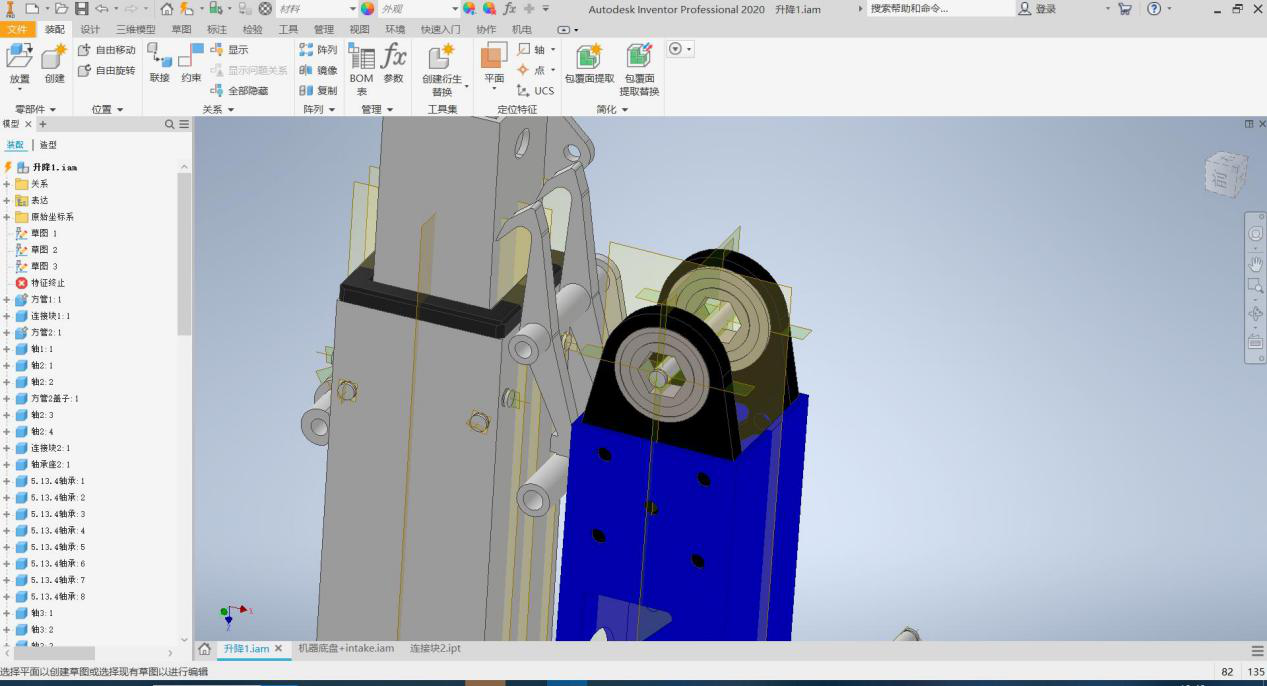
在动力传动方面,机械组决定使用775pro电机输出轴装配6t 20dp直齿轮,搭配40t 20dp直齿轮,作为第一级减速。做第二级减速时,因为考虑要将动力传输到下方的麦克纳姆轮处,所以使用带传动。同时24t gt2带轮搭配36t gt2带轮。在经过一级齿轮传动以及一级带传动后,最终减速比达到10.05:1(见图六)。但是在后期的设计中发现了intake一个严重的失误,在前期的计算当中,机械组没有将bumper的长度计算入其中,在将bumper的长度计入其中后发现intake在吸球过程中会与bumper起冲突导致球卡住进不来。于是经讨论后决定加长了intake支架的长度,并将辊子以及麦克纳姆轮位置至前(见图七),并且开始设计储球装置。
(图六)
(图七)
Climb
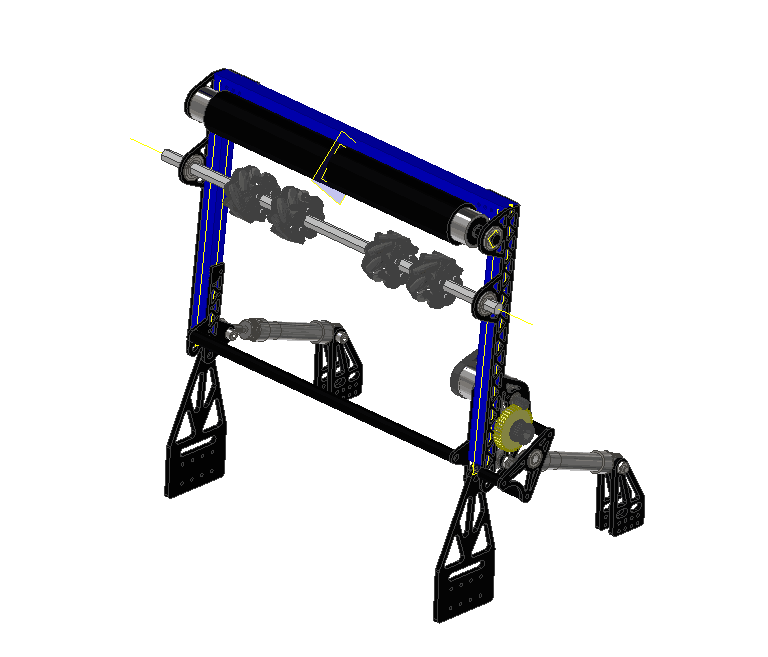
机械组设想使用电梯结构,将两个钩子搭在圆管上,比赛前会确定出队友与我方机器人重量,根据杠杆原理爬升不同处的杆子。如果只有我方一台机器人可以爬升,将单独爬升中间杠,保证机器人不会往一方倾斜与掉落。机械组尝试在机器尾部安装一根铝方管作为支柱(见图八),但在测试过型材的承受能努力后发现,一根铝方管无法承受机器人的重量,并且机器会发生严重的倾斜。经讨论后决定在机器人前端安装一根绳子与机器后的型材相连,且型材处于倾斜状态,使绳子与型材连接的点处于机器的中心,以保证机器能处于平衡状态。
(图八)
在爬升方面机械组决定使用曲柄摇杆机构,利用了气弹簧的伸缩,将型材从0至90度以及0至180度以内进行运动。并且在型材的中段安装了一个合页(见图九),可实现型材的自由转动。
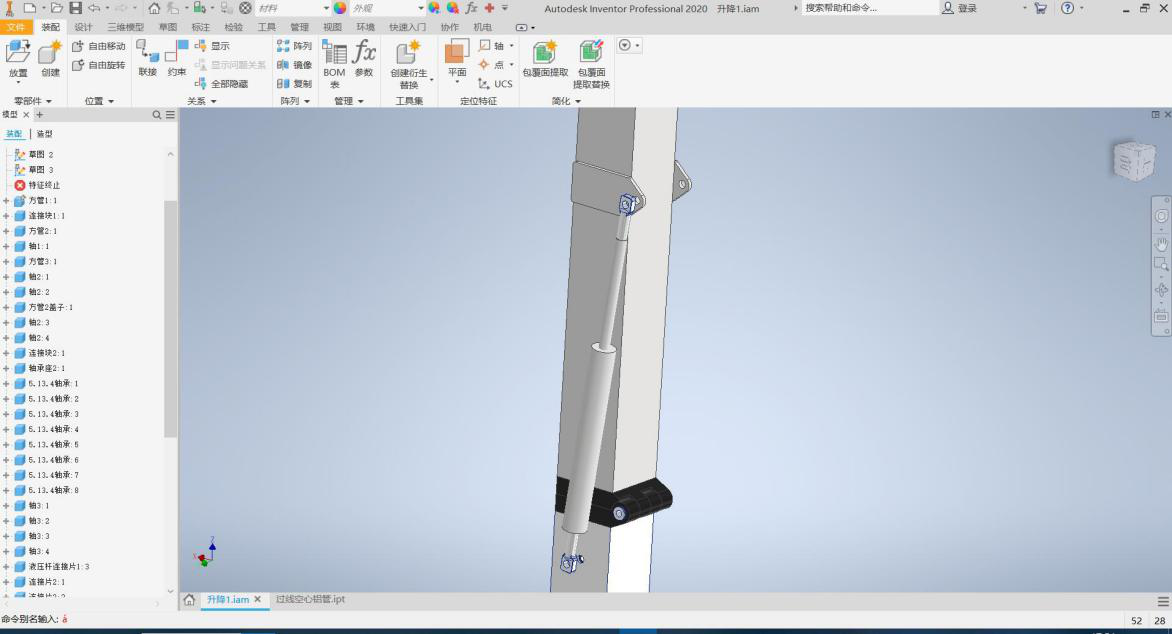
(图九)
并且决定了爬升机构的绕绳方法,决定在管内走线,同时绕线方式形成一个回路(图十),在电梯上升下降时获得动力。
(图十)
解决完爬升的问题后,机械组开始绘制了抓取护盾保护器的爪钩,在自动锁死的设计上使用了一个倒钩当爪钩抓取到护盾保护器后支架上的倒钩会由底部的弹簧打开并钩死支架上的支柱同时弹簧回弹,让倒钩与支架卡死,达到自动锁紧的目的(图十一)。
(图十一)
机械组继续对爬升装置进行进一步的改进以及计算,在爬升支架的底部使用1/2六方轴搭配控制支架的角度,在不用爬升的时候可以收入机器内部。
射球装置
机械组准备利用两个775电机搭配2in小飞轮反向转动(图十二)以达到射出能量电池的效果,经实验后得出减速比为1:4,发射高度不能达到预期效果,经讨论决定增大飞轮的直径以及减速比,以达到射出距离更远。

(图十二)
经过实验后决定在射球装置上,使用两个neo电机带动4in的辊子,当能量电池由机器内部传动机构送至射球处时,由电机带动的辊子会将能量电池吸取并射出(图十三),由电机连接直带进行传动。
(图十三)
因为之前机械组经计算决定使用内径304.8mm外径323.85mm,厚度9.525mm的轴承,相对于能量电池来说空隙过大会影响后面的能量电池传输效率,后经计算发现之前的计算错误,导致选用的轴承过大;计算后改用内径203.2mm,外径215.9mm,厚6.25mm的轴承。并使用了一个550电机搭配了一个20t的齿轮,从而转动330t的转盘,实现射球台的转动。(因为使射球台转动,可大大提升射球的准确率,提高得分机会)。
(图十四)
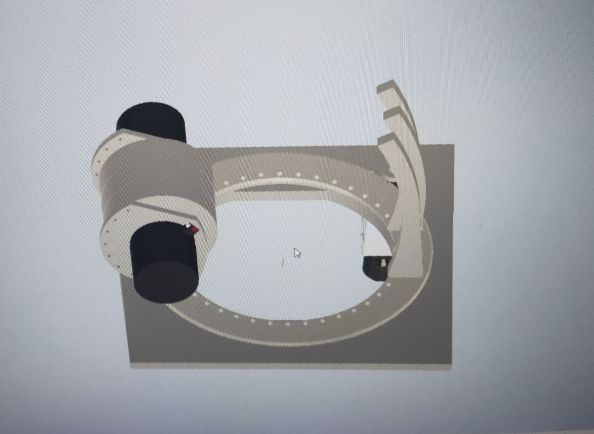
后来采用了两个neo电机来带动射球的摩擦轮(见图十五),并且在电机上安装带键槽的轴以便直接带动摩擦轮射球,并且在射球轨道的设计上使用了一个550电机,使轨道可以改变长度以达到改变射球的距离。同时在射台的转动上,机械组设计了一块铝板,在铝板的圆环内中段留下了一圈半月型的槽,外围留下一圈5mm的螺丝孔,并且安装上内径为203.2mm,外径215.9mm,厚6.25mm的轴承,在安装轴承的过程中,将轴承卡入铝板的卡槽中,随后使用5mm螺丝的前端卡入,以安装转台上的轴承,达到转台转动的目的。
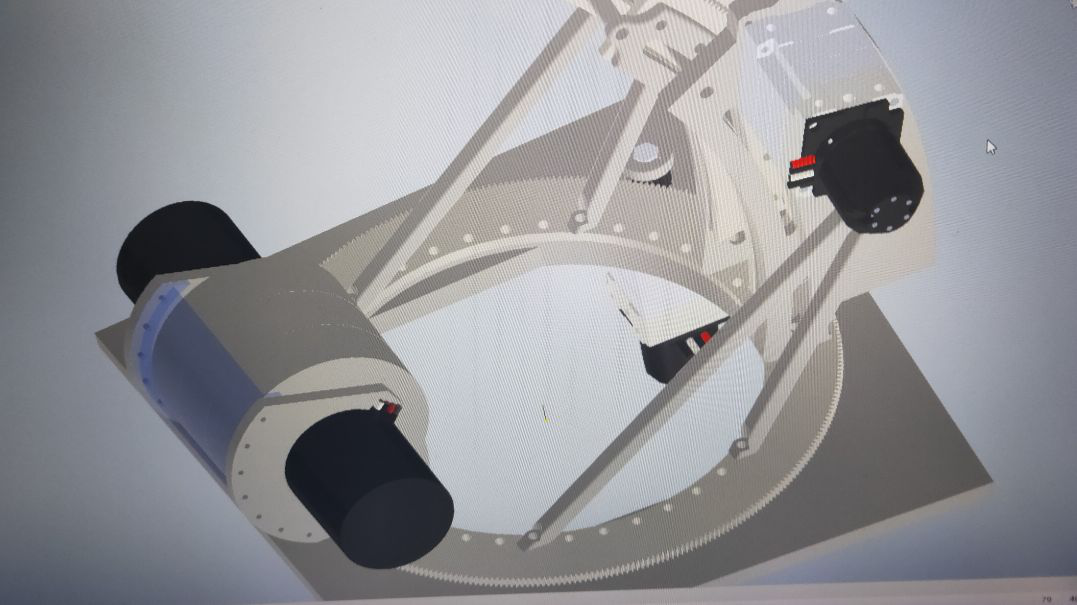
(图十五)
机械总装
机械组将把分类设计的机构组装在一起,intake和输球装置将安装在底盘之上,同时intake装置使用了曲柄摇杆机构,由气缸控制可以自由收放。其次爬升装置放置于机器两侧,在比赛的时候可收放至机器内部,需要爬升时由气缸控制可展开。射球装置放置机器后端。但是在intake吸进能量电池的时候,能量电池会因为摩擦轮高速运转时产生的惯性向前,当机器内部有能量电池的时候,如果再吸入能量电池的话,能量电池会由于高速的撞击飞出机器内,因此经过机械组的讨论后决定在intake进球口处加装两侧护板(图十六),以防止能量电池因惯性飞出。机械组决定采用输送带的方式将能量电池输送到射球口。在能量电池经intake机构吸纳到机器内部后,由一个775pro电机带动的传输带将能量电池输送至射球口,随后由一个775pro电机直接带动两个摩擦轮,搭配一个6t20dp的齿轮带动一个40t20dp的齿轮作为第一级减速比,第二级由40t20dp齿轮反向转动带动18t带轮,使对面的两个摩擦轮能够反向转动。在摩擦轮上通过带传动将动力传递给后部的麦克纳姆轮,使能量电池传送至射球的摩擦轮处。
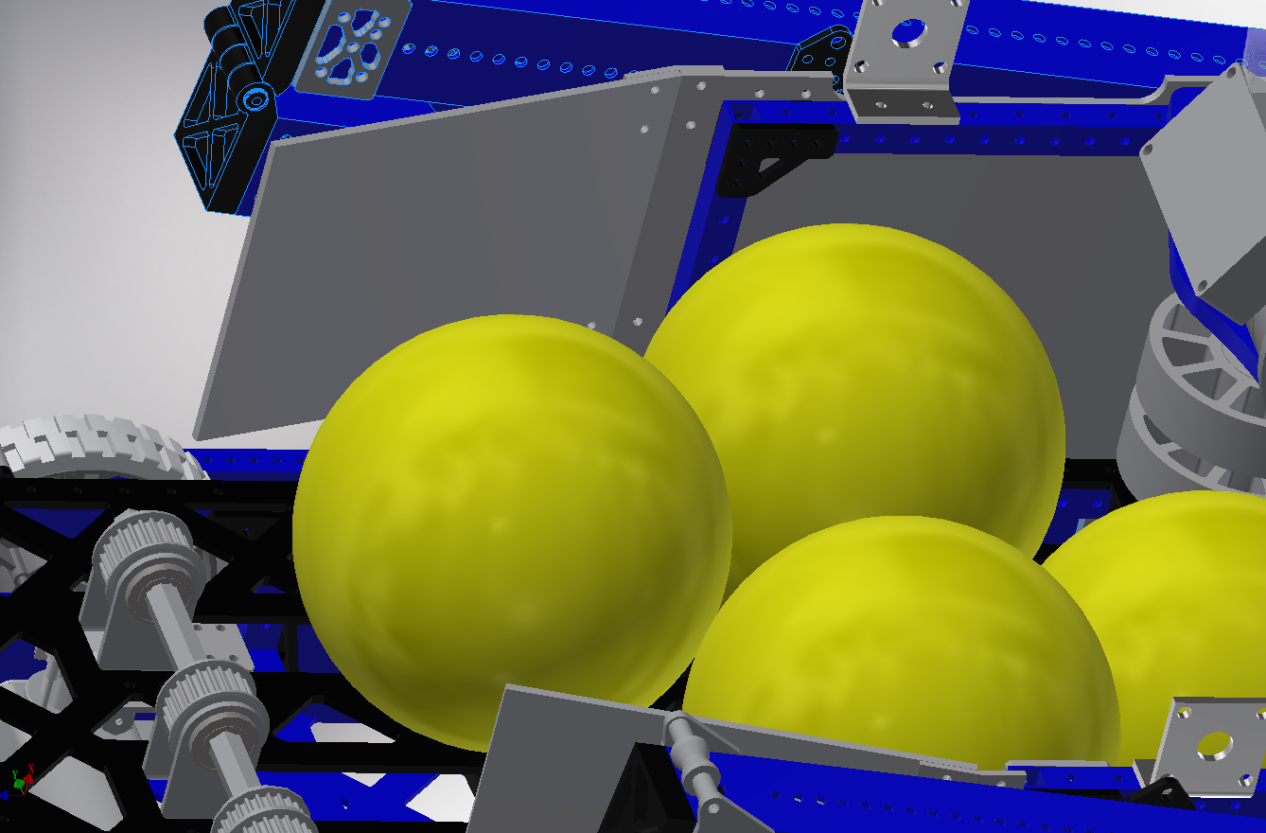
(图十六)
同时在储球上又发现了新的问题,能量电池的直径为7in,而射球口的高度比能量电池的高度少了0.6in,起先机械组认为能量电池在两侧摩擦轮的旋转中会因为形变而进入射球口,但随后的实验表明虽然能量电池的两侧会产生形变,但高度却不能形变,于是机械组的同学经讨论决定增加射球口的高度至12in。